Combat Robotics in the Hackspace
What is Combat Robotics?
Do you remember Robot Wars from TV? You might be surprised to know that the UK still has a vibrant robot fighting scene; it’s just got smaller and gone underground.
The Hackspace has a group of members who build combat robots at various weight classes. In addition to competing at events around the country we often run our own events in the space, ranging from tournaments to robot building workshops.
The robots you’ll have seen on Robot Wars or Battlebots are Heavyweights and have a 110kg weight limit. There are a small number of live shows in the UK featuring Heavyweight robots, but the cost of building and transporting robots of this size limits the number of entrants and the level of destruction on display.
Without the funding from TV, events generally run in smaller arenas. The most popular weight classes these days are Antweights where robots are limited to 150 grams, Beetleweights with a 1.5kg weight limit, and Featherweights with a 13.6kg (30lb) weight limit. Antweights are the smallest and most accessible weight class, and Antweight events are frequent enough that you could compete most weekends if you wanted to.
Combat Robotics in the Hackspace
During 2021 while the Hackspace open night was still online only, we ran a series of monthly maker challenges. Each month had a one word theme for members to (loosely) build a project around, for example “Wind”, “Set”, or “Spark”. For me these started with weird opto-electronic ukulele pickups and ended with DIY synthesisers.
When things started to open up a bit and we stopped the maker challenges, the creative energy had to go somewhere else. A group of us started talking about building antweight combat robots. After a few people got interested and started building, we organised a mini-tournament event at the space at the end of April 2022.

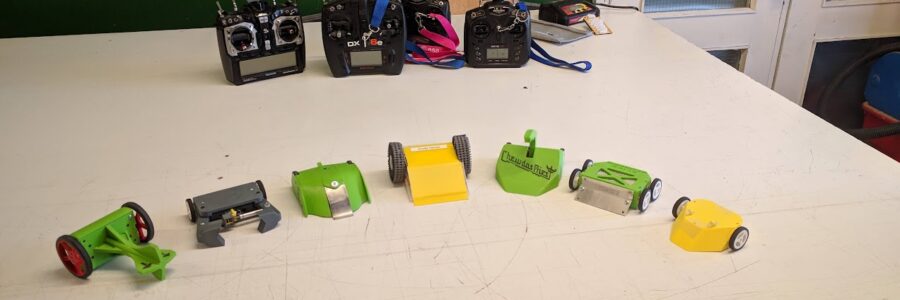
Never one to do things the easy way, I built my own set of radio gear for my Antweight robots using ESP8266 microcontrollers. This allowed me to integrate the motor controllers and the radio receiver onto a single board with the receiver in my robot. The robot communicated with a radio control transmitter I already had, using a custom module with its own ESP8266.
Those of us who built robots had an excellent time; it was great to see the space being used. This event led to a lot of interest and questions from spectators about how they could get started. The event was won by Simon Lindsay’s Alice Scooper – second from right in the photo above.
A few months later in July we organised our first public event: a building workshop where attendees were provided with a kit of parts to assemble their own robot before taking part in a tournament. You can find a more thorough write up from the event on the wiki. To keep costs down for this event I repurposed a version of my custom robot controller boards to act as a WiFi hotspot. Attendees could control their robots from a web app on their mobile phone instead of purchasing a standalone radio transmitter. This allowed people to get started for a reasonable price (£50 for the workshop) while limiting the number of parts they’d need to replace in order to switch to a more standard setup.
After serveral more informal meetups and Antweight mini tournaments throughout the year, members Sam Roberts, Becky Dowson, Simon Lindsay and I decided to try our hand at building a Beetleweight robot for Bristol Bot Builders Beetle Champs 2022. Over the course of a few months we designed and built Keith the Teeth: a spring powered robot inspired by a venus fly trap. Keith is mostly made from HDPE (a plastic usually used for cutting boards and milk bottles) parts machined on the Hackspace’s CNC machine, along with some 3D printed parts made in PLA and TPU. Keith is designed to use a Snail Cam mechanism so a motor can slowly open the jaw which will snap shut when the cam passes a thresold, hopefully grabbing our opponents.
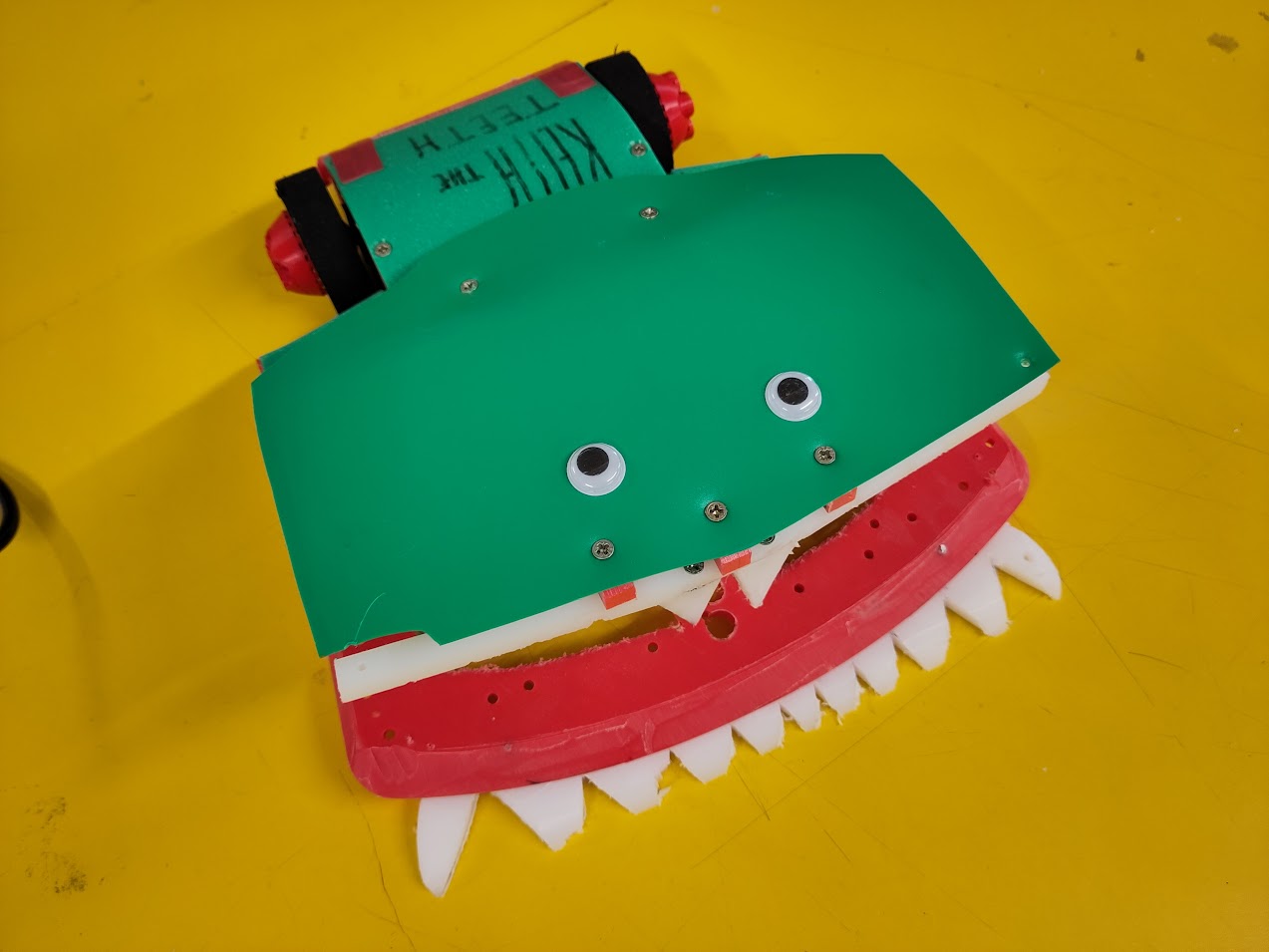
After finishing Keith on the morning of the event in our hotel room (and replacing our custom electronics that blew up at the last second), we made it through tech checks. Keith managed to hold his own, but the weapon proved tricky to control manually. Several of our fights ended with Keith in the pit. Unfortunately, Keith didn’t manage to win any of his fights. A split judges’ decision was our best performance at that event, but we came home with a Spirit of BBB Award for our efforts.
We continued experimenting with Antweights, including a road trip to Ant Freeze 9 in February 2023, before taking Keith to another Beetleweight event. We once again failed to win anything, this time unfortunately with more fire when one of Keith’s motors ingested the electronics that controlled the other motor!
After the success of the building workshop we decided to organise a more combat-focussed event, culminating with Hacktivate in October 2023.
Since then we’ve continued to run workshops, attend public events, and expanded to other weight classes with more Beetleweight and Featherweight robots. We will be organising another public Antweight event later this year, so stay tuned for announcements!
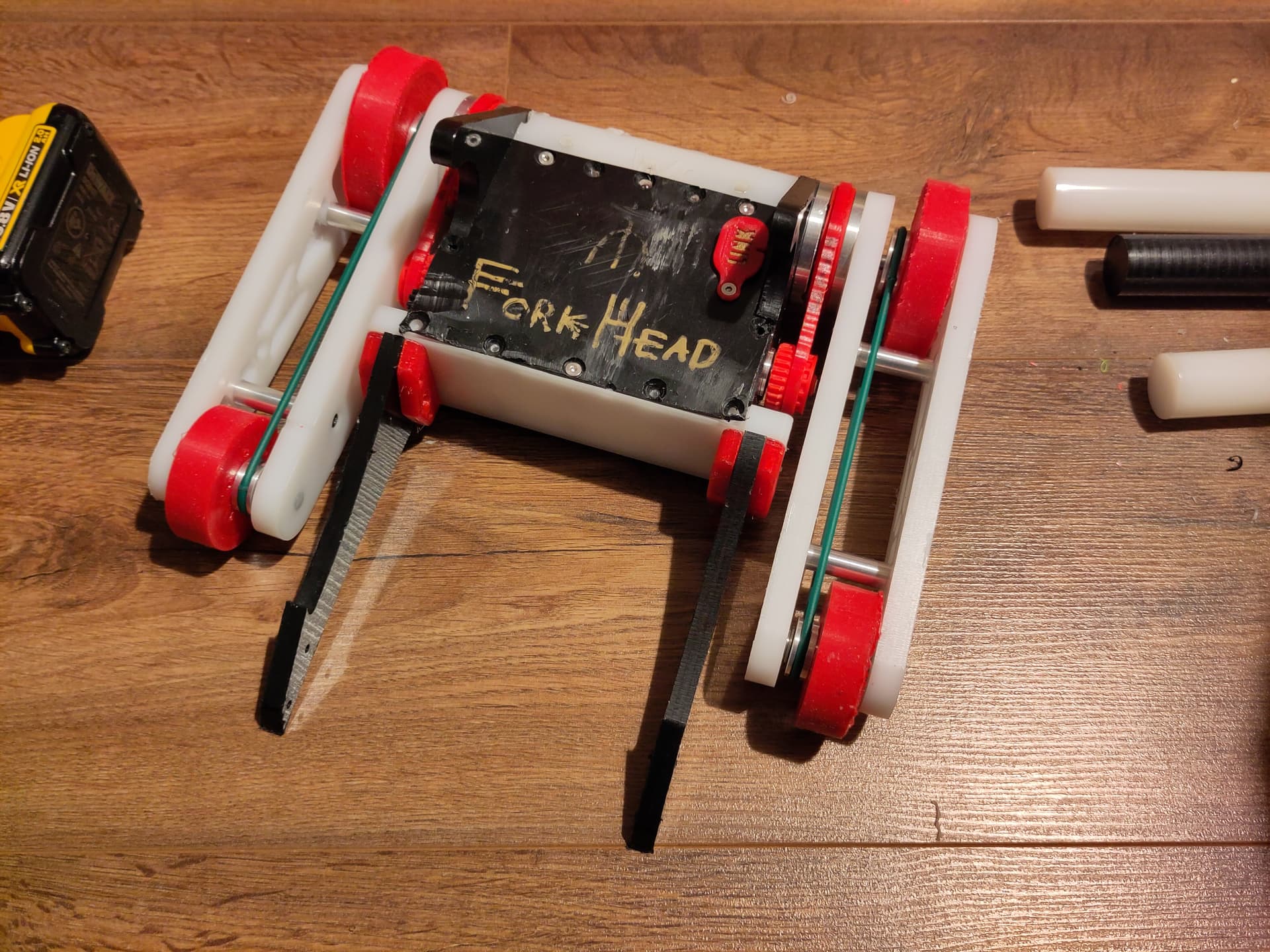
For Subterranean Showdown in 2023 I built my own Beetleweight: ForkHead. This was designed with a 360 degree lifter as a weapon with the drive motors mounted in tubes that the lifter mechanism could rotate around. After a hectic few weeks of building, we travelled down to Bristol with the robot not quite finished. After a late night doing last minute assembly, the robot was finished for real at the event.
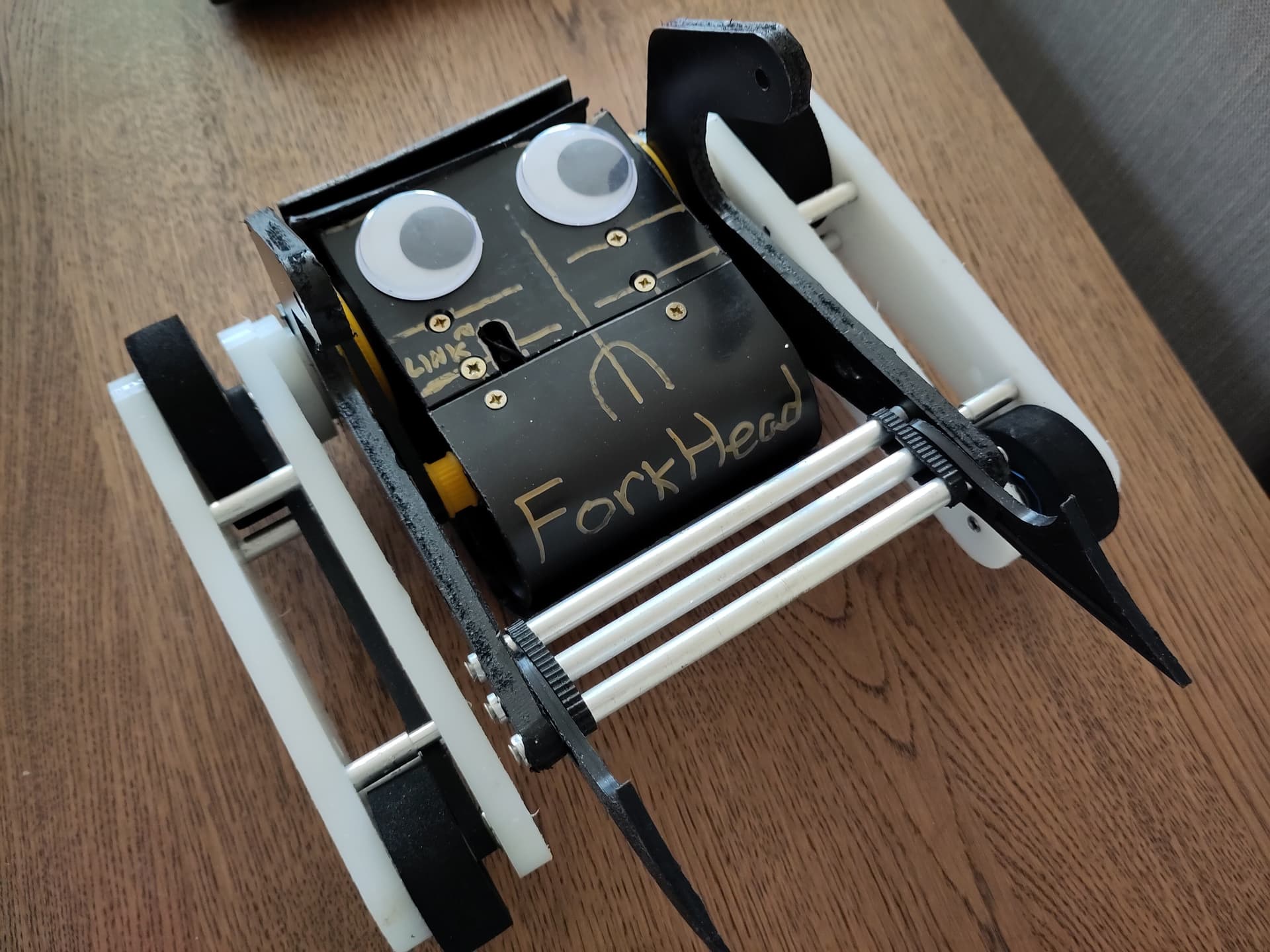
ForkHead had quite a few teething problems during this event. It struggled in the first fight due to low ground clearance; I had a set of larger wheels I’d collected at the event in my pocket but had not had time to fit. During its second fight it managed to get a good lift on its opponent and a promising start before losing power when the fuse wire in its safety link broke!
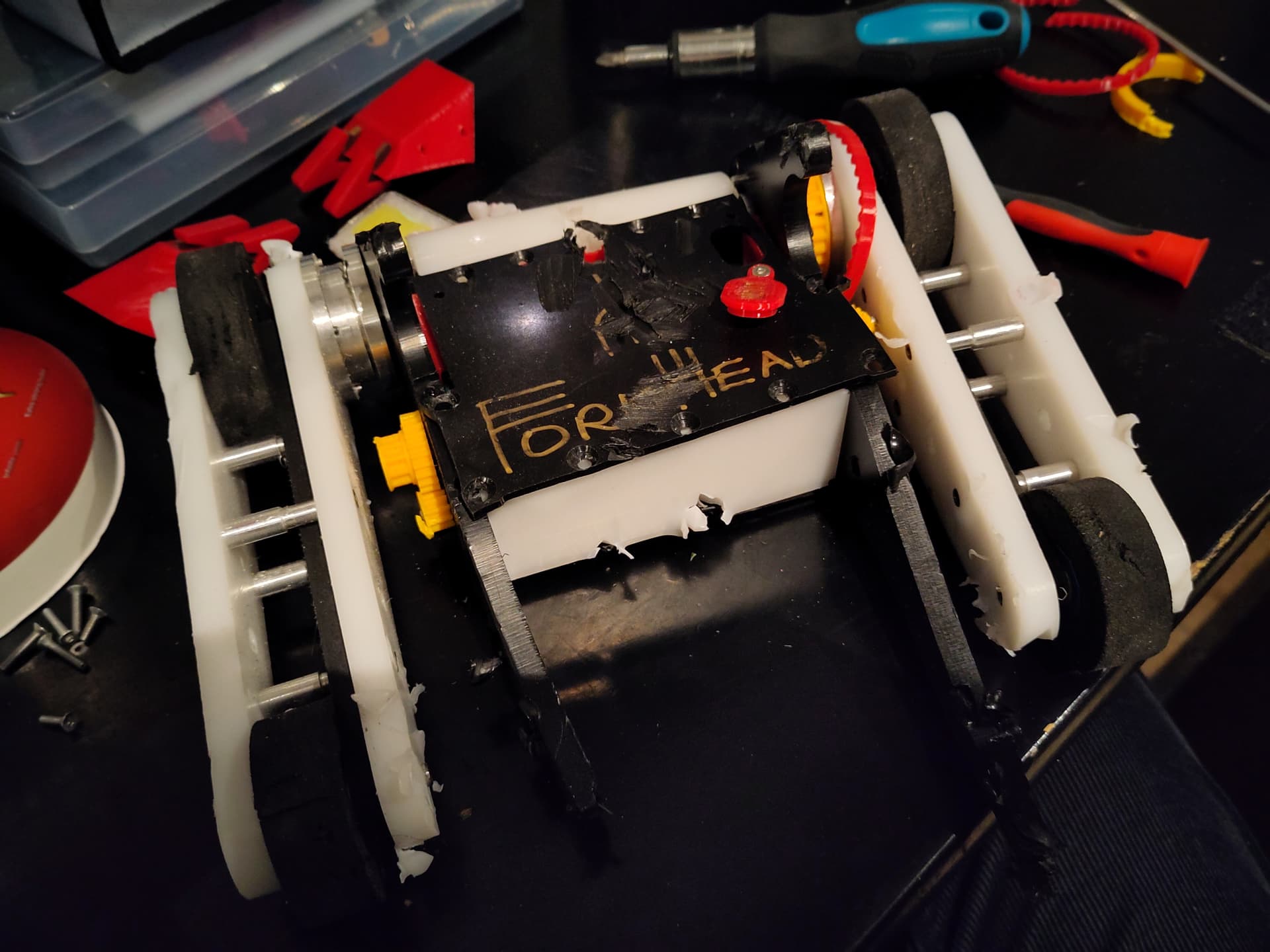
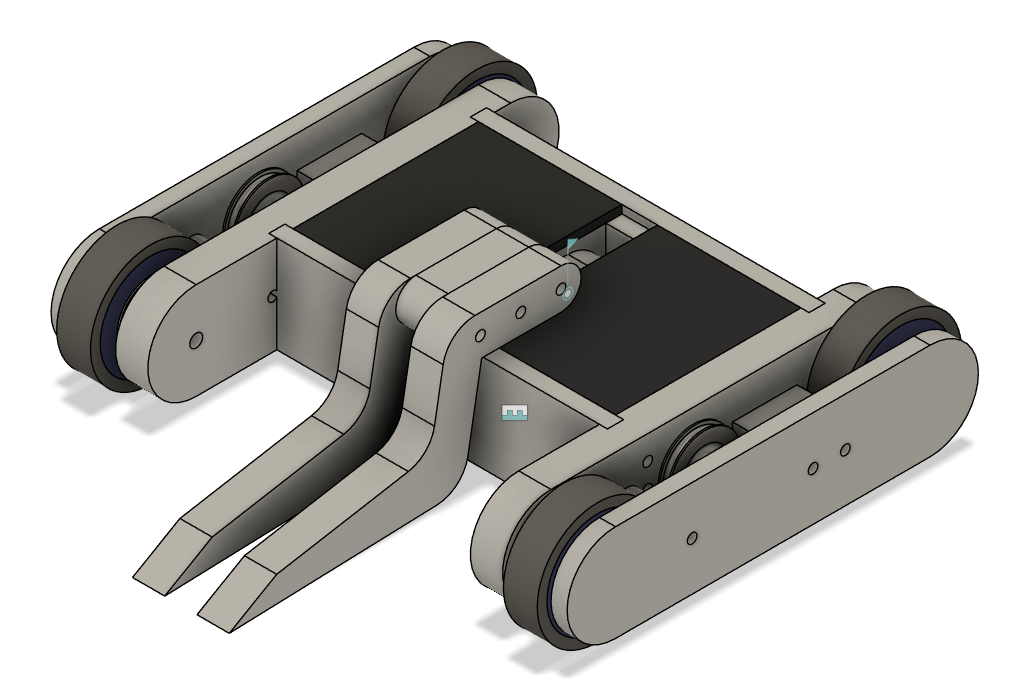
With the lessons learnt from the first version of ForkHead, I started work on a new version with an alternate take on the lifter mechanism. I designed the outer drive pods to rotate instead of a separate section, which effectively allows the entire centre section to be the lifter. This version uses some aluminium hubs with captive bearings to allow the drive pod to rotate. These were made on the Hackspace’s Denford CNC lathe.

ForkHead V2’s first outing subjected it to a brutal draw, with its first two fights being against two of the toughest spinners in the UK scene. It came out of the first of these fights extremely beat up but managed to keep going until the match timer elapsed, resulting in a judges’ decision. Unfortunately, I was not able to get it back to full form for its second fight, so it went in with no control of the lifter and struggled resulting in a loss due to the battery becoming exposed. Despite not making it to the third fight of the day, it took home the event’s Best Engineered award.
Since then I’ve made continued improvements to ForkHead to the point that it has started to become fairly competitive despite being an unusual design, with its best performance being making top 8 at a 2024 Pub Beetles event. You can read more about these improvements in my build log.
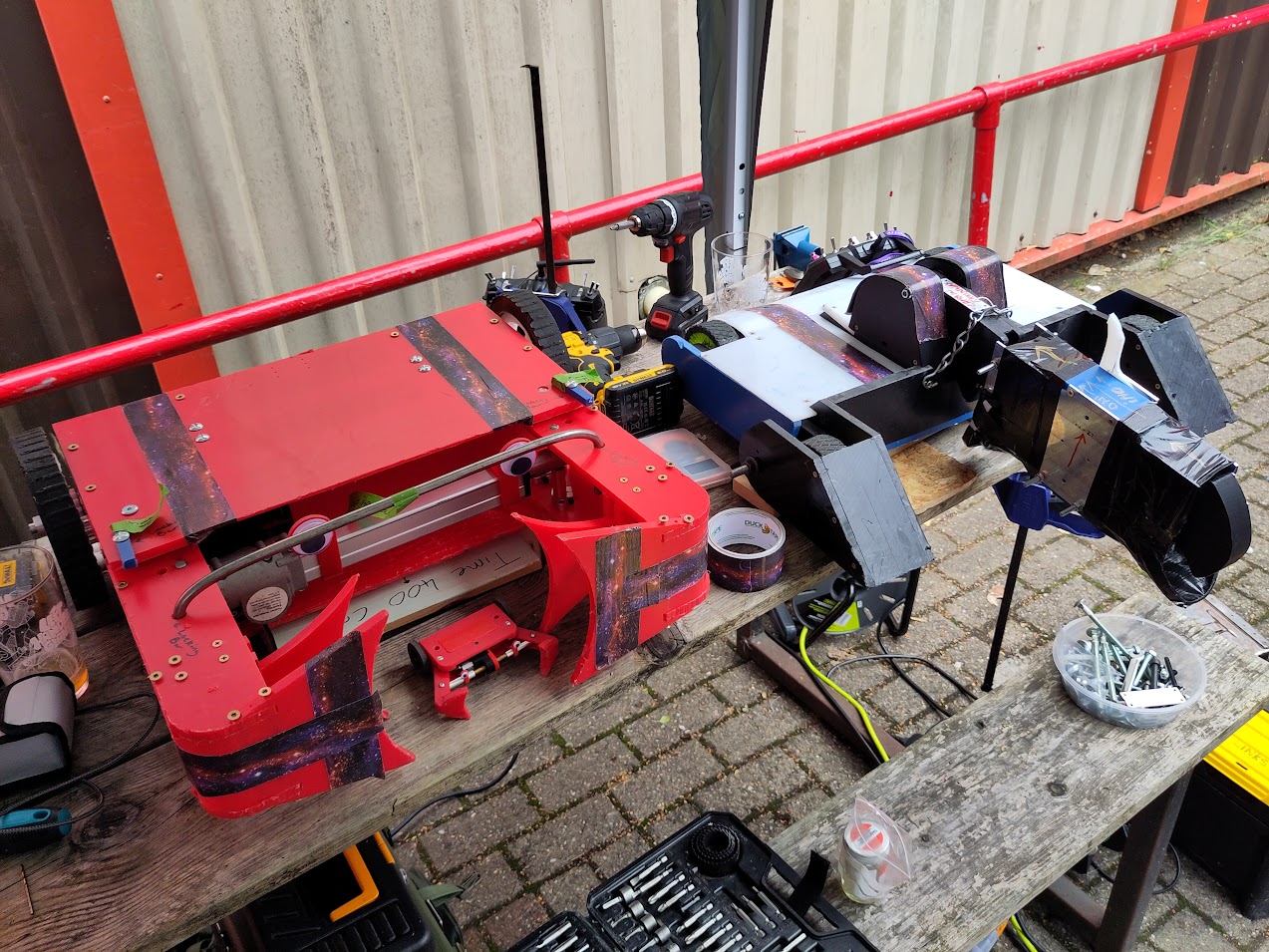
In April 2024 I used ForkHead as a mini-bot alongside Featherweights built by other Hackspace members. This was a great time and inspired me to build my own featherweight. I decided to build a (semi-accurate) scaled up version of my Antweight Time for Crab! using a linear actuator from a reclining chair to power the crab’s claws. This robot (named Time 400 Crab! since it’s approximately 100 times the weight of Time 4 Crab!) had its first outing at August BEVs, a sportsman Featherweight event, where it technically won (not that anybody was keeping score). This was also the second outing for Sam Roberts’ featherweight Kathryn Chainway, a chainsaw weilding robot.
Since then both Time 400 Crab! and Chainway, along with some of Sam’s other robots have been regulars at sportsman Featherweight events run near York by RoboDojo.
You can find out more in the build logs for Time 400 Crab! and Kathryn Chainway on the BBB forums.
This year, due to questions about tip speed limits for full combat Featherweights, RoboDojo have replaced their full combat Featherweight league with a full combat Hobbyweight league. Hobbyweights are a less common weight class with a 12lb (5.4kg) weight limit.
To this end I’ve been working on building a new robot in the Hobbyweight class. Krill Dozer is a four wheel drive robot that started out as a similar design to ForkHead without the 360 degree rotation. It is intended to have a fast lifter powered by a brushless motor to try to control its opponents. I am planning on running this as an additional entry for RoboDojo’s next event, which combines sportsman Featherweights and full combat Hobbyweights. The week after that event I intend to team up with Sam, who will also be building a Hobbyweight. We’re going to enter our two robots as a cluster into this year’s North Down Havok sportsman Featherweight event.
Building Your Own Robot
Being small and relatively cheap, Antweights are a great way to get started. You can buy a kit containing the commonly used parts fairly cheaply, and the Hackspace Combat Robotics group are happy to give advice and feedback.
Contrary to popular belief, you don’t need to know any programming or much electronics to build combat robots, although you will almost certainly pick up some electronics and troubleshooting skills along the way. Most of the essential components people use in their robots are off-the-shelf and fairly modular, so they can be plugged together and just work.
For your first robot you’ll need a pair of motors, an appropriate Electronic Speed Controller to drive them, a radio receiver (and a compatible transmitter), battery connectors, a power switch, some batteries, and a LiPo-safe bag for the batteries. It’s also worth buying some wheels to get started. The Antweight Drive Kit that Bristol Bot Builders sell contains all of this (with options), and is what we use for our workshops. Using this kit, you should be able to build your first robot for about £100. Additional robots will cost you about half that. The radio transmitter is a big part of the cost, but it can be reused for additional robots. There will be some soldering required to connect the motors to the ESC and to wire the power switch in-line with the battery connector.
For the mechanical side of their robots, people use a wide variety of construction techniques. For Antweights, 3D printing is very popular, PLA is very easy to print and works well enough, while robots printed in TPU (a flexible rubbery filament) can be near indestructible. For larger weight classes 3D printing does not hold up as well, but it is still useful for smaller parts that aren’t carrying large loads. At beetleweight and abovem HDPE plastic is an extremely common building material. In addition to being relatively light, it tends to ablate when hit instead of bending like most metals.
We recommend building a non-spinner Antweight as your first robot to get a feel for what is necessary. At Antweight sizes, metal gear servos are great for powering lifters, flippers, and grabbers. The metal gear servos can be plugged straight into your receiver.
Bristol Bot Builders have guides for all weight classes on their website.
Finding Events
In addition to being a great source of parts and information, Bristol Bot Builders maintain a calendar of upcoming events in the UK and Europe.
Join us in the Space
We regularly run informal antweight events for members and are looking to extend these to non members in the near future. These will be added as events to the Hackspace Discord.
We are also planning on running a larger public event later in the year, so keep an eye out for an announcement.